Hello, I am
Alvaro Galvis
Robotic Engineering Aspirant
“Revolutionizing motors and actuators for humanoid robot movement”
Winner of Colombia's Odyssey Competition • Director of Robotics Student Organization
About Me
The Next Great Roboticist

Alvaro Galvis
Director of Robotics Student Organization
Director of Robotics Student Organization
At Newman School, I lead the Nexus robotics team, managing projects, delegating responsibilities, and driving innovation.
I am a high school student who won Colombia's most prestigious rover competition: the Odyssey Competition.
Creativity
Devising efficient and unconventional solutions integrating aesthetic principles
Adaptability
Consistently demonstrating remarkable adaptability through life's transformations
Persistence
Maintaining steadfast determination toward objectives, transcending challenges
Lateral Thinking
Transforming impossible situations into tangible products
Awards & Recognition
Creativity & Innovation Award
2022, 2023, 2024
Three consecutive years of recognition
Odyssey Competition
2024
1st Place - Defeating university teams
Programming Olympiad
2025
Excellence in structured programming


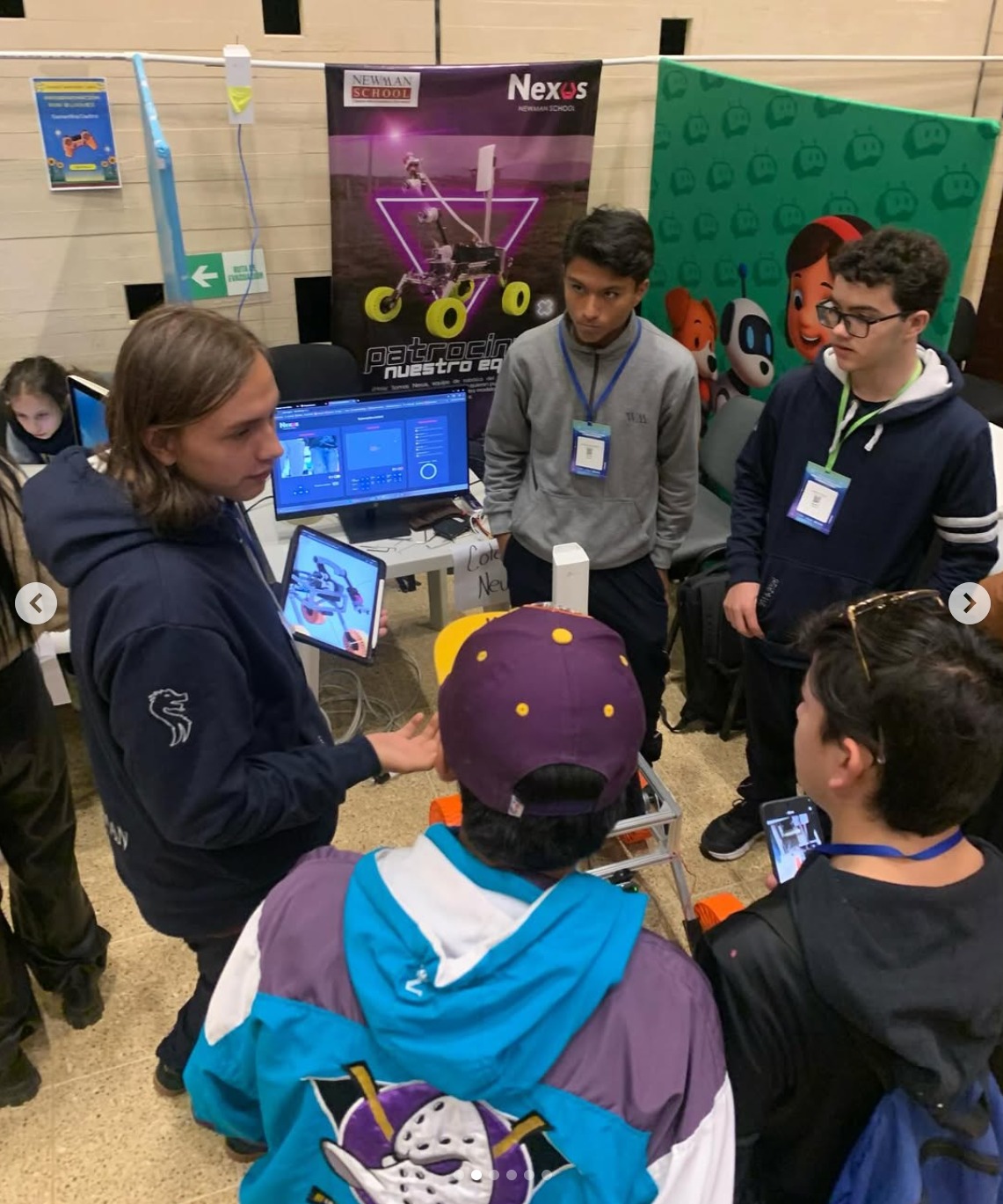
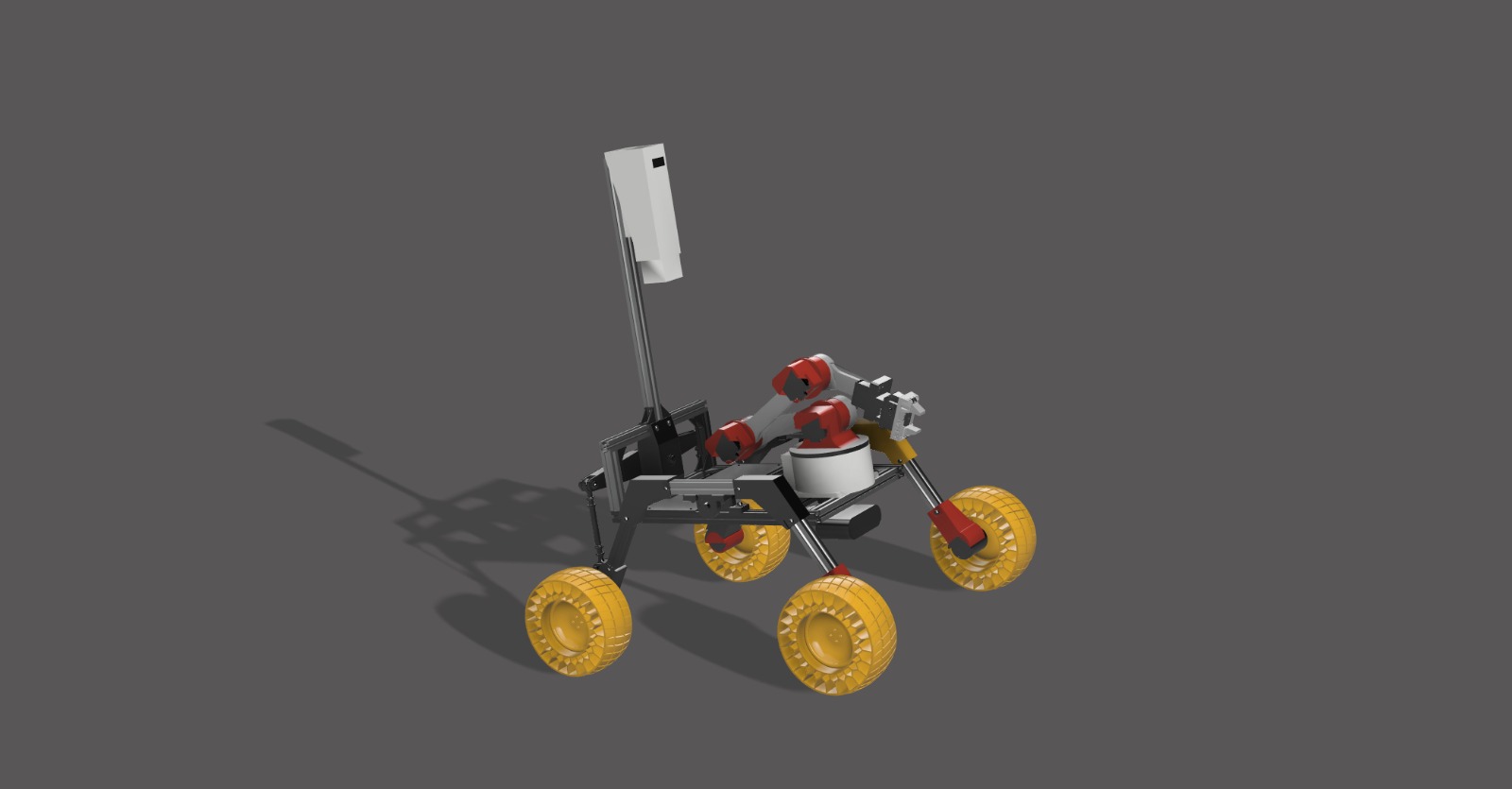
Project Nexus
Cyberspike Mars Rover
Victory Against University Teams
As high school students, we competed against the Military University of Nueva Granada and emerged victorious despite substantial resource constraints.
Mission Log
Space Exploration
Autonomous navigation with ArUco marker detection
Scientific Mission
Melocactus curvispinus identification and counting
Astronaut Support
Tool retrieval and relocation with robotic arm
Service & Repair
USB insertion and photovoltaic system activation
Challenges Overcome
Wheel Detachment
Fabrication of alternative axle assembly
During intense testing, the original aluminum axle design showed stress fractures. We rapidly prototyped a reinforced steel axle assembly with improved bearing mounts, completing the redesign and fabrication within 48 hours before competition.
Battery Depletion
Implementation of backup power system
Power consumption exceeded initial calculations due to motor current spikes. We implemented a dual-battery hot-swap system with intelligent load balancing, ensuring uninterrupted operation throughout the 45-minute competition missions.
Camera Malfunction
System reinitialization protocol
The primary Raspberry Pi camera module experienced intermittent failures under high computational load. We developed an automated watchdog system that detected frame drops and performed rapid camera reinitialization without interrupting autonomous navigation.
Arm Motor Failure
Deployment of alternative motor assemblies
A critical servo motor burned out during the practice round. Our modular design philosophy paid off as we swapped in a backup motor assembly in under 10 minutes, recalibrated the arm kinematics, and continued without missing our competition slot.
Hardware Specifications
Raspberry Pi 4 Model B
Computing
Arduino Mega 2560
Microcontroller
Arduino UNO
Arm Controller
Motor DC 12V 120RPM
Movement x4
Motor Stepper 9kg
Arm x4
3S LiPo Battery
Power
TP-Link CPE220
Communication
Logitech FHD Camera
Vision
Bill of Materials
Rover Demo Video
Digital Twin
Gazebo Simulation & ROS2 Architecture
ROS2 Node Architecture
camera_nodeFHD video streaming
aruco_detectorMarker detection & distance
motor_controllerDC motor commands
arm_controllerStepper motor control
plant_recognitionMelocactus detection
telemetry_bridgeSerial communication
OpenCV Integration
ArUco marker detection and plant recognition
Serial Communication
Raspberry Pi 4 to Arduino Mega data transfer
Telemetry System
TP-Link CPE220 access point for 2.4GHz communication
Autonomous Detection Logic
import cv2
import cv2.aruco as aruco
import serial
# Initialize ArUco detector
aruco_dict = aruco.getPredefinedDictionary(aruco.DICT_4X4_50)
parameters = aruco.DetectorParameters()
detector = aruco.ArucoDetector(aruco_dict, parameters)
# Serial communication with Arduino
arduino = serial.Serial('/dev/ttyUSB0', 9600)
def detect_and_stop(frame):
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
corners, ids, rejected = detector.detectMarkers(gray)
if ids is not None:
# Calculate distance to marker
marker_size = corners[0][0]
distance = estimate_distance(marker_size)
if distance < 2.0: # Stop within 2 meters
arduino.write(b'STOP')
return True
return FalseCommunication Flow
Sonic Architecture
Piano as Mathematical Expression
“The Stars”
An arabesque composition inspired by the classical works of Johann Sebastian Bach
Watch on YouTubeMusical Mentors
Oscar Cuesta Jiménez
7 years of instruction
Universidad del Rosario
David Schuster
3 years of instruction
University of Lyon 2
Performance Venues
πMathematical Music Analysis
Sine Wave - Sound Foundation
Every musical note is a sine wave with amplitude A, frequency f, and phase φ
Harmonic Series
Overtones create the timbre - frequency multiples of the fundamental
Golden Ratio in Music
Composers like Bach placed climaxes at the golden ratio point of their pieces
Equal Temperament Tuning
Each semitone multiplies frequency by the 12th root of 2
Other Compositions
“Calma Oye Calma”
Bambuco with guabina influences